BST二叉搜索树——数据结构系列教程(c++版)
梦想不会自己发光,真正闪耀的是那个为梦狂奔的你。献给知行的孩子们!(Eric.He著)
二叉搜索树(Binary Search Tree,简称BST)是一种满足特定有序性规则的二叉树,也是实现高效查找、插入、删除操作的基础数据结构,广泛应用于数据库索引、集合/映射等场景。本教程基于链表实现二叉搜索树,从核心原理、代码结构到实战使用,全面讲解二叉搜索树的原理与实现,功能包含插入、查找、删除、四种遍历(前序 / 中序 / 后序 /层序)、内存释放等核心功能。

教程目录导航
▼
一、二叉搜索树的核心原理
1.1 二叉搜索树(BST)特性
- 左子树所有节点值 < 根节点值;
- 右子树所有节点值 > 根节点值;
- 左右子树也满足 BST 特性(无重复值)。
1.2 关键特征
- BST中序遍历的结果为升序序列(这是BST最核心的标识)。
演示动画
1.3 优缺点分析
| 优点 | 缺点 |
|---|---|
| 查找、插入、删除平均时间复杂度为O(log₂n)(树平衡时) | 若插入数据有序(如1,2,3,4,5),BST会退化成链表,时间复杂度变为O(n) |
| 中序遍历可直接得到升序序列,无需额外排序 | 无自平衡机制,极端场景下性能大幅下降 |
| 链表存储结构,容量无限制 | 删除节点逻辑相对复杂(需处理3种不同情况) |
1.4 时间复杂度
| 操作 | 平均情况 | 最坏情况(退化为链表) |
|---|---|---|
| 查找 | O(log₂n) | O(n) |
| 插入 | O(log₂n) | O(n) |
| 删除 | O(log₂n) | O(n) |
| 空间复杂度 | O(n)(存储n个节点) | O(n) |
1.5 存储结构
二叉搜索树结构是一对多的关系,除了树根之外,每一个节点有唯一的直接前驱(父亲),除了叶子之外,每一个节点有一个或两个直接后继(孩子)。
可以采用顺序存储和链式存储两种形式:
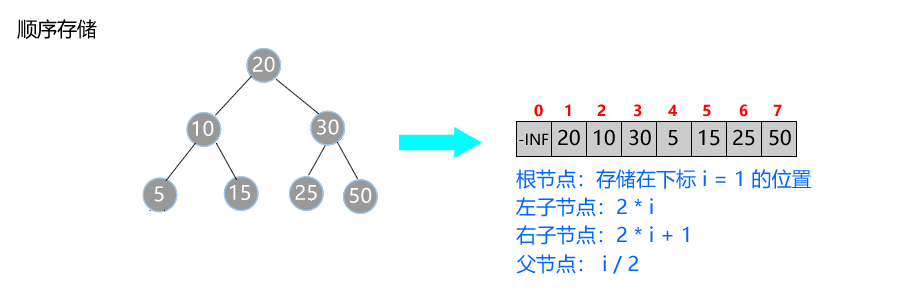
(1)顺序存储(数组)
把根节点存储在下标 i = 1 的位置,把左子节点存储在下标 2 * i = 2 的位置,右子节点存储在 2 * i + 1 = 3 的位置。树为满二叉树或完全二叉树时不会浪费太多存储空间。
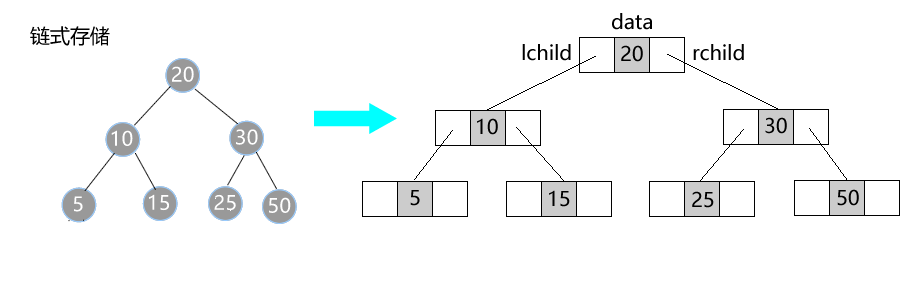
(1)链式存储(结构体)
每一个节点有三个域,即数据域data、lchild左节点地址、rchild右节点地址。
二、代码结构解析
2.1 整体架构
提供的代码是模板化的二叉搜索树实现(支持任意类型),采用C++结构体封装,分为头文件(声明)和源文件(实现)两部分,核心结构如下:
| 模块 | 作用 | 关键结构/函数 |
|---|---|---|
| BST节点结构体 | 存储数据、左节点指针、右节点指针 | BSTNode<T>(模板泛型) |
| 二叉搜索树结构体 | 封装所有操作 | LinkedBSTree<T>(模板类) |
2.2 关键结构体详解
(1)BST节点结构体(BSTNode)
template <typename T>
struct BSTNode {
T data;
BSTNode* left;
BSTNode* right;
};- 模板泛型:支持存储
int、float、自定义类型等任意类型(需重载比较运算符);
(3)二叉搜索树结构体(LinkedBSTree)
分为私有成员(内部实现)和公有成员(对外接口):
template <typename T>
struct LinkedBSTree{
//------------------------------------------------------------------------------------------------------
// 私有成员
// 注:私有成员只能在该结构体内部访问调用,外部通过该结构体定义(实例化)的变量(对象)不能访问调用)
//------------------------------------------------------------------------------------------------------
private:
//---------------声明私有成员变量---------------
BSTNode<T>* root; // 根节点指针
int level; // 用于跟踪搜索树的层次
int depth; // 用于跟踪搜索树的深度
int qty; // 用于跟踪搜索树的节点数量
//---------------声明私有成员函数---------------
BSTNode<T>* createTreeNode(const T& val);// 创建新的树节点
BSTNode<T>* findMin(BSTNode<T>* node);// 找右子树的最小节点
BSTNode<T>* insertNode(BSTNode<T>* node, const T& val);// 插入节点(递归版本)
BSTNode<T>* insertNodeIter(BSTNode<T>* node, const T& val);// 插入节点(迭代版本)
BSTNode<T>* deleteNode(BSTNode<T>* node, const T& val);// 删除节点(递归版本)
BSTNode<T>* deleteNodeIter(BSTNode<T>* node, const T& val);// 删除节点(迭代版本)
T searchNode(BSTNode<T>* node, const T& val);// 查找节点// 查找节点(递归版本)
T searchNodeIter(BSTNode<T>* node, const T& val);// 查找节点(迭代版本)
void preOrder(BSTNode<T>* node);// 前序遍历(根 → 左 → 右)
void inOrder(BSTNode<T>* node);// 中序遍历(左 → 根 → 右)→ 升序输出
void postOrder(BSTNode<T>* node);// 后序遍历(左 → 右 → 根)
void levelOrder(BSTNode<T>* node);// 层序遍历(从上到下、从左到右)
void destroyTree(BSTNode<T>* node);// 销毁整棵树(防止内存泄漏)
// ------------------------------------------------------------------------------------------------------
// 公共成员
// 注:公共成员能在该结构体内部访问调用,外部通过该结构体定义(实例化)的变量(对象)也能访问调用)
//-------------------------------------------------------------------------------------------------------
public:
//---------------声明公共成员函数---------------
// 构造函数:外部通过该结构体定义(实例化)变量(对象)时,自动执行该函数(主要用于初始化成员变量的值)
LinkedBSTree() {
level = depth = qty = 0;
root = nullptr; // 初始化为空树
}
int isEmpty();// 判断搜索树是否为空
int isFull();// 判断搜索树是否已满
void insertNode(const T& val);// 插入节点
void deleteNode(const T& val);// 删除节点
bool searchNode(const T& val);// 查找节点
void preOrder();// 前序遍历(根 → 左 → 右)
void inOrder();// 中序遍历(左 → 根 → 右)→ 升序输出
void postOrder();// 后序遍历(左 → 右 → 根)
void levelOrder();// 层序遍历(从上到下、从左到右)
void destroyTree();// 手动销毁整棵树(防止内存泄漏)
// 析构函数:自动销毁树,避免内存泄漏
~LinkedBSTree() {
destroyTree();
}
};三、核心操作实现详解
3.1 遍历操作
BST的遍历分为前序、中序、后序、层次,其中中序遍历是核心(升序输出)。
(1)前序遍历(preOrder)
从node节点开始,根 → 左 → 右的顺序遍历树,一般从root节点开始。采用递归的方式实现,如果节点数比较大建议采用迭代方式实现,防止内存溢出。
template <typename T>
void LinkedBSTree<T>::preOrder(BSTNode<T>* node)
{
if (node == nullptr) return;
printf("%d ", node->data);
preOrder(node->left);
preOrder(node->right);
}(2)中序遍历(inOrder)
从node节点开始,左 → 根 → 右的顺序遍历树,一般从root节点开始。采用递归的方式实现
template <typename T>
void LinkedBSTree<T>::inOrder(BSTNode<T>* node)
{
if (node == nullptr) return;
inOrder(node->left);
printf("%d ", node->data);
inOrder(node->right);
}(3)后序遍历(postOrder)
从node节点开始,左 → 右 → 根的顺序遍历树,一般从root节点开始。采用递归的方式实现
template <typename T>
void LinkedBSTree<T>::postOrder(BSTNode<T>* node)
{
if (node == nullptr) return;
postOrder(node->left);
postOrder(node->right);
printf("%d ", node->data);
}(4)后序遍历(levelOrder)
从node节点开始,从上到下、从左到右顺序遍历树。采用迭代+队列的方式实现
template <typename T>
void LinkedBSTree<T>::levelOrder(BSTNode<T>* node)
{
if (node == nullptr) return;
std::queue<BSTNode<T>*> queues;
queues.push(node); // 根节点入队
while (!queues.empty()) {
BSTNode<T>* curr = queues.front(); // 获取队头节点
queues.pop();// 出队头节点
printf("%d ", curr->data); // 输出当前节点值
// 左子节点入队(先左后右)
if (curr->left != NULL) {
queues.push(curr->left);
}
// 右子节点入队
if (curr->right != NULL) {
queues.push(curr->right);
}
}
}3.2 插入节点(insertNode)
插入流程:
- 递归或迭代找到空节点位置(终止条件);
- 比较值大小,决定插入左/右子树;
- 重复值直接返回(BST默认不存储重复值);
- 更新节点数量,返回新节点/原节点。
// 插入节点(递归版本)
template <typename T>
BSTNode<T>* LinkedBSTree<T>::insertNode(BSTNode<T>* node, const T& val)
{
if (node == nullptr) { // 空节点,创建新节点
return createTreeNode(val);
}
if (val < node->data) { // 小于当前节点,插入左子树
node->left = insertNode(node->left, val);
} else if (val > node->data) { // 大于当前节点,插入右子树
node->right = insertNode(node->right, val);
}
// 等于当前节点(重复值),BST 不存储重复值,直接返回原节点
return node;
}
// 插入节点(迭代版本)
template <typename T>
BSTNode<T>* LinkedBSTree<T>::insertNodeIter(BSTNode<T>* node, const T& val)
{
// 处理根节点为空的特殊情况
if (node == nullptr) {
return createTreeNode(val);
}
BSTNode<T>* current = node; // 遍历指针,从根节点开始
BSTNode<T>* parent = nullptr; // 记录当前节点的父节点
// 迭代查找插入位置
while (current != nullptr) {
parent = current; // 更新父节点为当前节点
if (val < current->data) { // 小于当前节点,向左子树查找
current = current->left;
} else if (val > current->data) { // 大于当前节点,向右子树查找
current = current->right;
} else {
// 找到重复值,直接返回原根节点(不插入)
return node;
}
}
// 找到插入位置,创建新节点并挂载到父节点的左/右子树
BSTNode<T>* newNode = createTreeNode(val);
if (val < parent->data) {
parent->left = newNode;
} else {
parent->right = newNode;
}
// 返回原根节点(根节点未变,除非一开始就是空树)
return node;
}
template <typename T>
BSTNode<T>* LinkedBSTree<T>::createTreeNode(const T& val)
{
BSTNode<T>* node = new BSTNode<T>(); // 动态分配模板类型节点
if (node == nullptr) { // 内存分配失败检查
perror("malloc failed");
exit(EXIT_FAILURE);
}
node->data = val;
node->left = nullptr;
node->right = nullptr;
qty++;
return node;
}
3.3 删除操作(deleteNode)
删除流程:
- 定位节点:递归找到值匹配的节点;
- 处理删除:
- 情况1(叶子节点):直接释放节点,返回空;
- 情况2(单子女节点):用子节点替换当前节点,释放当前节点;
- 情况3(双子女节点):找右子树最小值(后继节点)替换当前节点值,再删除后继节点;
- 更新节点数量,返回更新后的节点指针。
// 删除节点(递归版本)
template <typename T>
BSTNode<T>* LinkedBSTree<T>::deleteNode(BSTNode<T>* node, const T& val)
{
if (node == nullptr) { // 未找到要删除的节点
return nullptr;
}
// 1. 定位要删除的节点
if (val < node->data) {
node->left = deleteNode(node->left, val);
} else if (val > node->data) {
node->right = deleteNode(node->right, val);
} else {
// 2. 处理删除逻辑(分3种情况)
// 情况1:叶子节点(无左右子树)
if (node->left == nullptr && node->right == nullptr) {
free(node);
qty--;
return nullptr;
}
// 情况2:只有一个子树
else if (node->left == nullptr) { // 只有右子树
BSTNode<T>* temp = node->right;
free(node);
qty--;
return temp;
} else if (node->right == nullptr) { // 只有左子树
BSTNode<T>* temp = node->left;
free(node);
qty--;
return temp;
}
// 情况3:有两个子树 → 找右子树最小节点(后继)替换
else {
BSTNode<T>* minRight = findMin(node->right);
node->data = minRight->data; // 替换值
node->right = deleteNode(node->right, minRight->data); // 删除后继节点
}
}
return node;
}
// 删除节点(迭代版本)
template <typename T>
BSTNode<T>* LinkedBSTree<T>::deleteNodeIter(BSTNode<T>* node, const T& val)
{
// 根节点为空,直接返回
if (node == nullptr) {
return nullptr;
}
BSTNode<T>* current = node; // 遍历指针,寻找待删除节点
BSTNode<T>* parent = nullptr; // 待删除节点的父节点
bool isLeftChild = false; // 标记待删除节点是父节点的左/右孩子
// 第一步:迭代查找待删除节点,并记录其父节点和左右孩子标记
while (current != nullptr && current->data != val) {
parent = current;
if (val < current->data) {
current = current->left;
isLeftChild = true;
} else {
current = current->right;
isLeftChild = false;
}
}
// 未找到待删除节点,直接返回原根节点
if (current == nullptr) {
return node;
}
// 第二步:处理删除逻辑(分3种情况)
BSTNode<T>* nodeToDelete = current;
BSTNode<T>* replacement = nullptr; // 替换待删除节点的节点
// 情况1:叶子节点(无左右子树)
if (current->left == nullptr && current->right == nullptr) {
replacement = nullptr;
}
// 情况2:只有一个子树
else if (current->left == nullptr) { // 只有右子树
replacement = current->right;
} else if (current->right == nullptr) { // 只有左子树
replacement = current->left;
}
// 情况3:有两个子树 → 找右子树最小节点(后继)替换
else {
// 迭代查找右子树的最小节点(最左节点)
BSTNode<T>* minParent = current;
BSTNode<T>* minNode = current->right;
while (minNode->left != nullptr) {
minParent = minNode;
minNode = minNode->left;
}
// 替换待删除节点的值
current->data = minNode->data;
// 处理最小节点的替换(最小节点要么是叶子,要么只有右子树)
if (minParent == current) { // 最小节点是待删除节点的直接右孩子
minParent->right = minNode->right;
} else { // 最小节点在右子树的左分支
minParent->left = minNode->right;
}
// 要删除的节点变为找到的最小节点
nodeToDelete = minNode;
// 原待删除节点无需替换(值已更新)
replacement = current;
}
// 第三步:更新父节点的子节点指针,并释放内存
if (replacement != current) { // 非双孩子情况,需要更新父节点指针
if (parent == nullptr) { // 待删除节点是根节点
node = replacement;
} else if (isLeftChild) { // 待删除节点是父节点的左孩子
parent->left = replacement;
} else { // 待删除节点是父节点的右孩子
parent->right = replacement;
}
}
// 释放待删除节点的内存
free(nodeToDelete);
qty--;
// 返回删除后的根节点
return node;
}
找右子树的最小节点(findMin)辅助函数
template <typename T>
BSTNode<T>* LinkedBSTree<T>::findMin(BSTNode<T>* node)
{
while (node->left != nullptr) {
node = node->left;
}
return node;
}四、实战使用示例
4.1 基础类型(int)使用示例
#include <iostream>
#include "LinkedBSTree.h"
int main() {
// 1. 创建bst对象
LinkedBSTree<int> bst;
// 2. 插入节点
bst.insertNode(10);
bst.insertNode(20);
bst.insertNode(5);
bst.insertNode(30);
// 3. 中序遍历(升序输出)
std::cout << "中序遍历结果:" << std::endl;
bst.inOrder();
// 4. 查找节点
if (bst.searchNode(20)) {
std::cout << "找到节点20" << std::endl;
}
// 5. 删除节点
bst.deleteNode(10);
std::cout << "删除10后中序遍历:" << std::endl;
bst.inOrder();
// 6. 销毁树
bst.destroyTree();
return 0;
}4.2 自定义类型(Student)使用示例
需先定义Student类,并重载比较运算符(<、==):
#include <iostream>
#include "Entitys.h"
#include "LinkedBSTree.h"
// 使用示例
int main() {
LinkedBSTree<Student> studentBst;
// 插入学生节点
studentBst.insertNode({1001,"Eric", "2012-05-18", "男", "汉", "湖南省湘潭县石潭镇", 400, "石潭傎芙蓉中学", "36","在读"});
studentBst.insertNode({1002,"Bob", "2012-05-18", "男", "汉", "湖南省湘潭县石潭镇", 400, "石潭傎芙蓉中学", "36","在读"});
studentBst.insertNode({1003,"Charlie", "2012-05-18", "男", "汉", "湖南省湘潭县石潭镇", 400, "石潭傎芙蓉中学", "36","在读"});
// 中序遍历(按ID升序)
studentBst.inOrder();
// 删除学生
studentBst.deleteNode({1003,"", "", "", "", "", 0, "", "",""}); // 仅需ID匹配
return 0;
}五、完整可运行代码
5.1 Entitys.h 头文件
#ifndef ENTITYS_H_INCLUDED
#define ENTITYS_H_INCLUDED
//************************************************************************************************************************************************************************
// 自定义类型
//************************************************************************************************************************************************************************
//========================================================================================================================================================================
// 学生结构体(Student)
//========================================================================================================================================================================
struct Student {
int id;// 学号
std::string name;// 姓名
std::string dob;// 出生日期
std::string sex;// 性别
std::string gender;// 民族
std::string address;// 地址
float score;// 入学总分
std::string school;// 学校
std::string team;// 班级
std::string status;// 状态
bool operator<(const Student& other) const { return id < other.id; }
bool operator>(const Student& other) const { return id > other.id; }
bool operator==(const Student& other) const { return id == other.id; }
bool operator!=(const Student& other) const { return id != other.id; }
friend std::ostream& operator<<(std::ostream& os, const Student& s) {
os << "[" << s.id<< ", " << s.name << ", " << s.dob << ", " << s.sex << ", " << s.gender << ", " << s.address << ", " << s.score<< ", " << s.school<< ", " << s.team<< ", " << s.status << "]";
return os;
}
};
//========================================================================================================================================================================
//
// 学生索引结构体(Student)
//
//========================================================================================================================================================================
struct StudentIndex {
int id;// 学号
int row;// 行号
bool operator<(const StudentIndex& other) const { return id < other.id; }
bool operator>(const StudentIndex& other) const { return id > other.id; }
bool operator==(const StudentIndex& other) const { return id == other.id; }
bool operator!=(const StudentIndex& other) const { return id != other.id; }
friend std::ostream& operator<<(std::ostream& os, const StudentIndex& i) {
os << "[" << i.id << ", " << i.row<< "]";
return os;
}
};
//========================================================================================================================================================================
// 迷宫坐标结构体(Pos)
//========================================================================================================================================================================
struct Pos{
int x; //x坐标
int y; //y坐标
int step; //步数
};
//========================================================================================================================================================================
// 打印任务结构体(PrintTask)
//========================================================================================================================================================================
struct PrintTask{
int taskId; // 任务ID
char content[50]; // 打印内容
};
#endif // ENTITYS_H_INCLUDED
5.2 LinkedBSTree.h 头文件
#ifndef LINKEDBSTREE_H_INCLUDED
#define LINKEDBSTREE_H_INCLUDED
#include <queue> // STL队列
#include "Entitys.h"
//========================================================================================================================================================================
//
// BST节点结构体(BSTNode)
//
//========================================================================================================================================================================
template <typename T>
struct BSTNode {
T data;
BSTNode* left;
BSTNode* right;
};
//========================================================================================================================================================================
//
// 二叉搜索树结构体(LinkedBSTree)
//
//========================================================================================================================================================================
template <typename T>
struct LinkedBSTree{
//------------------------------------------------------------------------------------------------------
// 私有成员
// 注:私有成员只能在该结构体内部访问调用,外部通过该结构体定义(实例化)的变量(对象)不能访问调用)
//------------------------------------------------------------------------------------------------------
private:
//---------------声明私有成员变量---------------
BSTNode<T>* root; // 根节点指针
int level; // 用于跟踪搜索树的层次
int depth; // 用于跟踪搜索树的深度
int qty; // 用于跟踪搜索树的节点数量
//---------------声明私有成员函数---------------
BSTNode<T>* createTreeNode(const T& val);// 创建新的树节点
BSTNode<T>* findMin(BSTNode<T>* node);// 找右子树的最小节点
BSTNode<T>* insertNode(BSTNode<T>* node, const T& val);// 插入节点(递归版本)
BSTNode<T>* insertNodeIter(BSTNode<T>* node, const T& val);// 插入节点(迭代版本)
BSTNode<T>* deleteNode(BSTNode<T>* node, const T& val);// 删除节点(递归版本)
BSTNode<T>* deleteNodeIter(BSTNode<T>* node, const T& val);// 删除节点(迭代版本)
T searchNode(BSTNode<T>* node, const T& val);// 查找节点(递归版本)
T searchNodeIter(BSTNode<T>* node, const T& val);// 查找节点(迭代版本)
void preOrder(BSTNode<T>* node);// 前序遍历(根 → 左 → 右)
void inOrder(BSTNode<T>* node);// 中序遍历(左 → 根 → 右)→ 升序输出
void postOrder(BSTNode<T>* node);// 后序遍历(左 → 右 → 根)
void levelOrder(BSTNode<T>* node);// 层序遍历(从上到下、从左到右)
void destroyTree(BSTNode<T>* node);// 销毁整棵树(防止内存泄漏)
// ------------------------------------------------------------------------------------------------------
// 公共成员
// 注:公共成员能在该结构体内部访问调用,外部通过该结构体定义(实例化)的变量(对象)也能访问调用)
//-------------------------------------------------------------------------------------------------------
public:
//---------------声明公共成员函数---------------
// 构造函数:外部通过该结构体定义(实例化)变量(对象)时,自动执行该函数(主要用于初始化成员变量的值)
LinkedBSTree() {
level = depth = qty = 0;
root = nullptr; // 初始化为空树
}
BSTNode<T>* getRoot();// 获取root指针
int isEmpty();// 判断搜索树是否为空
int isFull();// 判断搜索树是否已满
void insertNode(const T& val);// 插入节点
void deleteNode(const T& val);// 删除节点
T searchNode(const T& val);// 查找节点
void preOrder();// 前序遍历(根 → 左 → 右)
void inOrder();// 中序遍历(左 → 根 → 右)→ 升序输出
void postOrder();// 后序遍历(左 → 右 → 根)
void levelOrder();// 层序遍历(从上到下、从左到右)
void destroyTree();// 手动销毁整棵树(防止内存泄漏)
// 析构函数:自动销毁树,避免内存泄漏
~LinkedBSTree() {
destroyTree();
}
};
#endif // LINKEDBSTREE_H_INCLUDED
5.3 LinkedBSTree.cpp 程序代码
#include <iostream>
#include <cstdlib>
#include "LinkedBSTree.h"
//---------------实现私有成员函数---------------
// 创建新的树节点
template <typename T>
BSTNode<T>* LinkedBSTree<T>::createTreeNode(const T& val)
{
BSTNode<T>* node = new BSTNode<T>(); // 动态分配模板类型节点
if (node == nullptr) { // 内存分配失败检查
perror("malloc failed");
exit(EXIT_FAILURE);
}
node->data = val;
node->left = nullptr;
node->right = nullptr;
qty++; // 节点数+1
return node;
}
// 找右子树的最小节点
template <typename T>
BSTNode<T>* LinkedBSTree<T>::findMin(BSTNode<T>* node)
{
while (node->left != nullptr) {
node = node->left;
}
return node;
}
// 插入节点(递归版本)
template <typename T>
BSTNode<T>* LinkedBSTree<T>::insertNode(BSTNode<T>* node, const T& val)
{
if (node == nullptr) { // 空节点,创建新节点
qty++;
return createTreeNode(val);
}
if (val < node->data) { // 小于当前节点,插入左子树
node->left = insertNode(node->left, val);
} else if (val > node->data) { // 大于当前节点,插入右子树
node->right = insertNode(node->right, val);
}
// 等于当前节点(重复值),BST 不存储重复值,直接返回原节点
return node;
}
// 插入节点(迭代版本)
template <typename T>
BSTNode<T>* LinkedBSTree<T>::insertNodeIter(BSTNode<T>* node, const T& val)
{
// 处理根节点为空的特殊情况
if (node == nullptr) {
return createTreeNode(val);
}
BSTNode<T>* current = node; // 遍历指针,从根节点开始
BSTNode<T>* parent = nullptr; // 记录当前节点的父节点
// 迭代查找插入位置
while (current != nullptr) {
parent = current; // 更新父节点为当前节点
if (val < current->data) { // 小于当前节点,向左子树查找
current = current->left;
} else if (val > current->data) { // 大于当前节点,向右子树查找
current = current->right;
} else {
// 找到重复值,直接返回原根节点(不插入)
return node;
}
}
// 找到插入位置,创建新节点并挂载到父节点的左/右子树
BSTNode<T>* newNode = createTreeNode(val);
if (val < parent->data) {
parent->left = newNode;
} else {
parent->right = newNode;
}
// 返回原根节点(根节点未变,除非一开始就是空树)
return node;
}
// 删除节点(递归实现)
template <typename T>
BSTNode<T>* LinkedBSTree<T>::deleteNode(BSTNode<T>* node, const T& val)
{
if (node == nullptr) { // 未找到要删除的节点
return nullptr;
}
// 1. 定位要删除的节点
if (val < node->data) {
node->left = deleteNode(node->left, val);
} else if (val > node->data) {
node->right = deleteNode(node->right, val);
} else {
// 2. 处理删除逻辑(分3种情况)
// 情况1:叶子节点(无左右子树)
if (node->left == nullptr && node->right == nullptr) {
free(node);
qty--;
return nullptr;
}
// 情况2:只有一个子树
else if (node->left == nullptr) { // 只有右子树
BSTNode<T>* temp = node->right;
free(node);
qty--;
return temp;
} else if (node->right == nullptr) { // 只有左子树
BSTNode<T>* temp = node->left;
free(node);
qty--;
return temp;
}
// 情况3:有两个子树 → 找右子树最小节点(后继)替换
else {
BSTNode<T>* minRight = findMin(node->right);
node->data = minRight->data; // 替换值
node->right = deleteNode(node->right, minRight->data); // 删除后继节点
}
}
return node;
}
// 删除节点(迭代版本)
template <typename T>
BSTNode<T>* LinkedBSTree<T>::deleteNodeIter(BSTNode<T>* node, const T& val)
{
// 根节点为空,直接返回
if (node == nullptr) {
return nullptr;
}
BSTNode<T>* current = node; // 遍历指针,寻找待删除节点
BSTNode<T>* parent = nullptr; // 待删除节点的父节点
bool isLeftChild = false; // 标记待删除节点是父节点的左/右孩子
// 第一步:迭代查找待删除节点,并记录其父节点和左右孩子标记
while (current != nullptr && current->data != val) {
parent = current;
if (val < current->data) {
current = current->left;
isLeftChild = true;
} else {
current = current->right;
isLeftChild = false;
}
}
// 未找到待删除节点,直接返回原根节点
if (current == nullptr) {
return node;
}
// 第二步:处理删除逻辑(分3种情况)
BSTNode<T>* nodeToDelete = current;
BSTNode<T>* replacement = nullptr; // 替换待删除节点的节点
// 情况1:叶子节点(无左右子树)
if (current->left == nullptr && current->right == nullptr) {
replacement = nullptr;
}
// 情况2:只有一个子树
else if (current->left == nullptr) { // 只有右子树
replacement = current->right;
} else if (current->right == nullptr) { // 只有左子树
replacement = current->left;
}
// 情况3:有两个子树 → 找右子树最小节点(后继)替换
else {
// 迭代查找右子树的最小节点(最左节点)
BSTNode<T>* minParent = current;
BSTNode<T>* minNode = current->right;
while (minNode->left != nullptr) {
minParent = minNode;
minNode = minNode->left;
}
// 替换待删除节点的值
current->data = minNode->data;
// 处理最小节点的替换(最小节点要么是叶子,要么只有右子树)
if (minParent == current) { // 最小节点是待删除节点的直接右孩子
minParent->right = minNode->right;
} else { // 最小节点在右子树的左分支
minParent->left = minNode->right;
}
// 要删除的节点变为找到的最小节点
nodeToDelete = minNode;
// 原待删除节点无需替换(值已更新)
replacement = current;
}
// 第三步:更新父节点的子节点指针,并释放内存
if (replacement != current) { // 非双孩子情况,需要更新父节点指针
if (parent == nullptr) { // 待删除节点是根节点
node = replacement;
} else if (isLeftChild) { // 待删除节点是父节点的左孩子
parent->left = replacement;
} else { // 待删除节点是父节点的右孩子
parent->right = replacement;
}
}
// 释放待删除节点的内存
free(nodeToDelete);
qty--;
// 返回删除后的根节点
return node;
}
// 查找节点(递归实现)
template <typename T>
bool LinkedBSTree<T>::searchNode(BSTNode<T>* node, const T& val)
{
if (node == nullptr) { // 未找到
return false;
}
if (val == node->data) { // 找到目标值
return true;
} else if (val < node->data) { // 往左子树找
return searchNode(node->left, val);
} else { // 往右子树找
return searchNode(node->right, val);
}
}
// 查找节点(迭代版本)
template <typename T>
T LinkedBSTree<T>::searchNodeIter(BSTNode<T>* node, const T& val)
{
// 初始化遍历指针,从传入的节点(通常是根节点)开始
BSTNode<T>* current = node;
// 迭代遍历:只要当前节点不为空,就继续查找
while (current != nullptr) {
if (val == current->data) {
// 找到目标值,直接返回
return current->data;
} else if (val < current->data) {
// 目标值更小,向左子树查找
current = current->left;
} else {
// 目标值更大,向右子树查找
current = current->right;
}
}
// 遍历到空节点,说明未找到,返回T类型的默认值(和递归版本一致)
return T();
}
// 前序遍历(根 → 左 → 右)
template <typename T>
void LinkedBSTree<T>::preOrder(BSTNode<T>* node)
{
if (node == nullptr) return;
printf("%d ", node->data);
preOrder(node->left);
preOrder(node->right);
}
// 中序遍历(左 → 根 → 右)→ 升序输出
template <typename T>
void LinkedBSTree<T>::inOrder(BSTNode<T>* node)
{
if (node == nullptr) return;
inOrder(node->left);
printf("%d ", node->data);
inOrder(node->right);
}
// 后序遍历(左 → 右 → 根)
template <typename T>
void LinkedBSTree<T>::postOrder(BSTNode<T>* node)
{
if (node == nullptr) return;
postOrder(node->left);
postOrder(node->right);
printf("%d ", node->data);
}
// 层序遍历(从上到下、从左到右)
void LinkedBSTree<T>::levelOrder(BSTNode<T>* node)
{
if (node == nullptr) return;
std::queue<BSTNode<T>*> queues;
queues.push(node); // 根节点入队
while (!queues.empty()) {
BSTNode<T>* curr = queues.front(); // 获取队头节点
queues.pop();// 出队头节点
printf("%d ", curr->data); // 输出当前节点值
// 左子节点入队(先左后右)
if (curr->left != NULL) {
queues.push(curr->left);
}
// 右子节点入队
if (curr->right != NULL) {
queues.push(curr->right);
}
}
}
// 销毁整棵树(防止内存泄漏)
template <typename T>
void LinkedBSTree<T>::destroyTree(BSTNode<T>* node)
{
if (node == nullptr) return;
destroyTree(node->left);
destroyTree(node->right);
delete node;
}
//---------------实现公共成员函数---------------
// 获取root指针
template <typename T>
BSTNode<T>* LinkedBSTree<T>::getRoot()
{
return root;
}
// 判断搜索树是否为空
template <typename T>
int LinkedBSTree<T>::isEmpty()
{
return root == nullptr ? 1 : 0;
}
// 判断搜索树是否已满(链表实现永远不满,返回0)
template <typename T>
int LinkedBSTree<T>::isFull()
{
return 0;
}
// 插入节点
template <typename T>
void LinkedBSTree<T>::insertNode(const T& val)
{
//root = insertNode(root, val);// 插入节点(递归版本)
root = insertNodeIter(root, val);// 插入节点(迭代版本)
}
// 删除节点
template <typename T>
void LinkedBSTree<T>::deleteNode(const T& val)
{
//root = deleteNode(root, val);// 删除节点(递归版本)
root = deleteNodeIter(root, val);// 删除节点(迭代版本)
}
// 查找节点
template <typename T>
bool LinkedBSTree<T>::searchNode(const T& val)
{
//return searchNode(root,val);// 查找节点(递归版本)
return searchNodeIter(root,val);// 查找节点(迭代版本)
}
// 前序遍历(根 → 左 → 右)
template <typename T>
void LinkedBSTree<T>::preOrder()
{
preOrder(root);
}
// 中序遍历(左 → 根 → 右)→ 升序输出
template <typename T>
void LinkedBSTree<T>::inOrder()
{
inOrder(root);
}
// 后序遍历(左 → 右 → 根)
template <typename T>
void LinkedBSTree<T>::postOrder()
{
postOrder(root);
}
// 销毁整棵树(防止内存泄漏)
template <typename T>
void LinkedBSTree<T>::destroyTree()
{
destroyTree(root);
printf("\n===== 树内存已全部释放 =====\n");
}
// 显式实例化常用类型(避免链接错误,可选)
template class LinkedRBTree<int>;
template class LinkedRBTree<char>;
template class LinkedRBTree<float>;
template class LinkedBSTree<std::string>;
template class LinkedAVLTree<Student>; // 新增:显式实例化Student类型
template class LinkedAVLTree<StudentIndex>; // 新增:显式实例化StudentIndex类型
main.cpp 测试代码
#include "LinkedBSTree.h"
#include <iostream>
#include <string>
int main() {
// ==================== 测试1:int类型BST搜索树 ====================
LinkedBSTree<int> intTree;
int intKeys[] = {10, 20, 30, 15, 25, 5, 8};
int n = sizeof(intKeys)/sizeof(intKeys[0]);
// 插入int节点
std::cout << "=== Insert int keys: ";
for (int i = 0; i < n; i++) {
std::cout << intKeys[i] << " ";
intTree.insertNode(intKeys[i]);
}
std::cout << "===" << std::endl;
intTree.preOrder();
// 查找测试
int target = 31;
if (intTree.searchNode(target)) {
std::cout << "\nFound " << target << " in int tree!" << std::endl;
}
// 删除测试
int deleteKey = 5;
std::cout << "\n=== Delete key: " << deleteKey << " ===" << std::endl;
intTree.deleteNode(deleteKey);
// 前序遍历
intTree.preOrder();
// 销毁树(析构函数自动调用,此处显式调用演示)
intTree.destroyTree();
return 0;
}六、注意事项
模板类型约束:
- 模板类型需支持
</>/==运算符(内置类型如int/string默认支持,自定义类型需重载); - 自定义类型需重载
<<运算符(遍历输出时使用)。
内存管理:
- 析构函数自动调用
destroyTree(),无需手动释放,但手动调用也可; - 插入/删除时会自动更新节点数(
qty),可扩展接口返回节点数。
重复值处理:代码中二叉搜索树不存储重复值(插入时直接返回),若需支持重复值,可修改插入逻辑(如按<=/>=处理)。
显式实例化:代码末尾的template class LinkedBSTree<int>;等显式实例化,避免链接错误,新增类型需补充显式实例化。
七、总结
二叉搜索树是最基础的有序二叉树结构,核心价值在于有序性和高效的查找/插入/删除:
- 中序遍历的升序特性是BST的核心标识,可直接用于有序输出;
- 链表实现的BST无容量限制,适配任意类型数据(模板化);
- 缺点是无自平衡机制,有序插入会退化为链表,需结合AVL/红黑树优化。
本教程通过代码解析和实战示例,覆盖了BST的核心原理、关键操作实现和实际使用场景,掌握BST是学习高级平衡树(如AVL、红黑树)的基础,适用于需要高效有序数据操作的场景(如小型索引、有序集合管理)。
返回顶部